无人机测绘设备中使用的三维点云数据主要是通过激光雷达传感器获取的。激光雷达工作原理是利用高精度激光发射器和接收器配合完成对目标的扫描测量。在飞行过程中,激光雷达以高速度向地面发射成千上万束光脉冲,每条光脉冲从发射到被反射回所用的时间与脉冲传播速度有关,再结合发射点到接收点之间的距离,就可以计算出物体表面的距离,通过采集的大量数据建立三维模型。
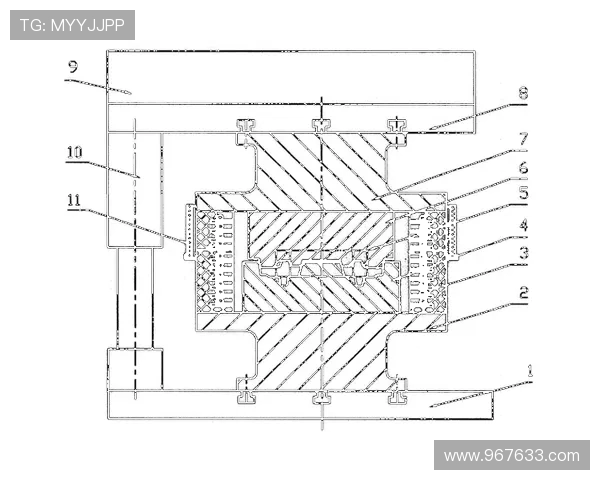
无人机测绘中的液压系统一般用于调节飞行姿态、控制起降等动作。液压系统由电机驱动泵,泵工作后会产生高压油液,这些油液在经过一系列阀控部件之后推动活塞或柱塞完成所需的动作。液压系统的工作逻辑包括压力检测、流量分配、运动控制三个关键环节。
在无人机飞行过程中,液压系统需要承受较大的压力波动。例如,在起飞阶段飞机受到的重力较大,这时液压系统就需要提供足够的压力来保证设备能够可靠工作;降落时由于地面反作用力减小了对系统的负荷要求,此时系统压力可以相应降低。而随着飞机姿态的变化或运动控制,也需要通过调节各个液压阀的动作实现对油路中压差和流量的精确调控。
无人机在实际使用过程中还可能会遇到各种突发情况。例如风速变化会使得飞行高度受到影响,进而影响到整个系统中的压力和速度参数,此时就需要工程师及时检查是否存在异常现象并进行相应的维护;如果电池电量不足也会导致飞机无法正常起飞,这时就必须迅速查明故障原因并采取措施予以修复。
对于液压系统的常见问题,一线维修技师首先需要根据症状判断出可能是哪个环节出了故障。例如发现无人机在起降时油压表读数异常升高,可能是因为某个压力传感器出现故障;如果电机驱动泵不工作,则可能存在线路接头松脱或是内部损坏等情况。
此外,在日常维护过程中也要注重对液压系统各部件的检查和保养工作。定期进行清洁、润滑以及必要的检查工作,可以有效避免因长期使用导致yth2206游艇会磨损或泄漏问题的发生。